Определение реакций опор твердого тела
Задача 3
Определение реакций опор твердого тела
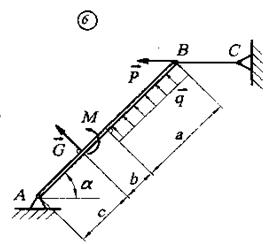
На графических схемах 1-30 (приложение В) изображены расчетные схемы конструкций, нагруженных системой внешних сил и пар сил: Р, G, q, М. Размеры и нагрузки приведены в таблице 3.
Таблица 3
|
Номер строки |
Р, кН |
G, кН |
M кНм |
q, qмах, кН/м |
а |
а, м |
b, м |
с, м |
|
4 |
4 |
22 |
2,2 |
5,0 |
45° |
3 |
2 |
2 |
|
|
Задача 4
Определение реакций опор составной конструкции (для механических и строительных специальностей)
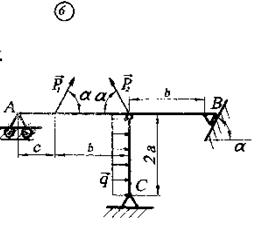
На графических схемах 1-30 (приложение Г) изображены расчетные схемы составных конструкций, нагруженных системой внешних сил и пар сил: P1, P2, q, М. Размеры и нагрузки приведены в таблице 4.
Таблица 4
|
Номер строки |
P1кН |
P2 кН |
М, кН*м |
q, кН/м |
а |
а, м |
b, м |
с, м |
|
4 |
5 |
16 |
1,4 |
5,0 |
30° |
4 |
3 |
1 |
Задача 5
Определение реакций опор твердого тела
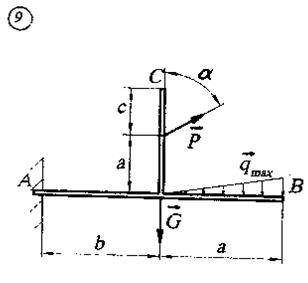
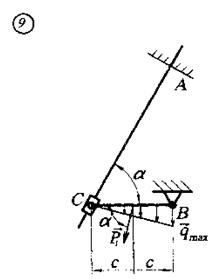
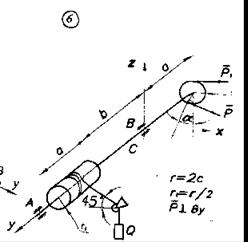
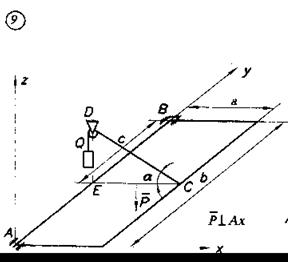
На графических схемах 1-30 (приложение Д) изображены расчетные схемы конструкций, нагруженных произвольной системой внешних сил. Размеры и нагрузки приведены в таблице 5.
|
Номер строки |
P, кН |
Q, КН |
a, м |
b, м |
с, м |
а |
|
4 |
5 |
10 |
0,40 |
0,6 |
0,30 |
30° |

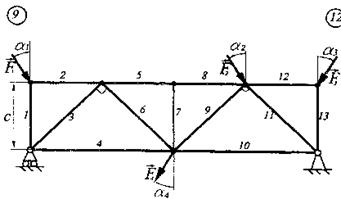
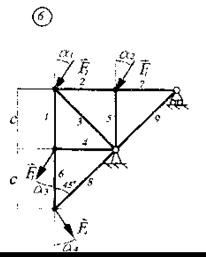
Задача 6
Определение усилий в стержнях плоской фермы
На графических схемах 1-30 (приложение Е) представлены схемы ферм, нагрузка и размеры которых указаны в таблице 6.
Таблица 6
|
Номер строки |
Сила. кН |
Угол |
а, м |
с, м |
||||||
|
F1 |
F2 |
F3 |
F4 |
a1 |
a2 |
a3 |
a4 |
|||
|
4 |
30 |
10 |
10 |
20 |
60° |
50° |
90° |
45° |
3 |
2 |

![]()


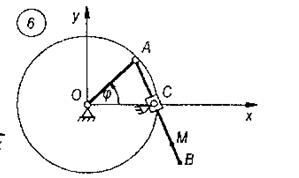
Задание К-1 «Кинематика точки»
Для точек А и М заданного механизма составить конечные уравнения движения в системе координат оху, Найти уравнение траектории точки А в координатной форме и закон её движения по траектории. Определить скорость V, ускорения аt , ап, а точки М при t =t1 и радиус кривизны р в соответствующей точке траектории точки М. Вычертить участок траектории точки М для интервала [о, t1,] и изобразить V, аt , ап, а точки М в момент t
Схемы механизмов помещены на рис. А. 1 приложения А, расчетные данные — в таблице А.2.
|
Номер варианта |
ᵠ, радиан |
OA, см |
ВМ, см |
ОО1, см |
t1 ,с |
|
4 |
|
15 |
20 |
10 |
0,5 |
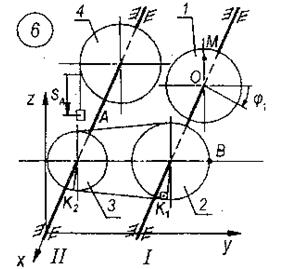
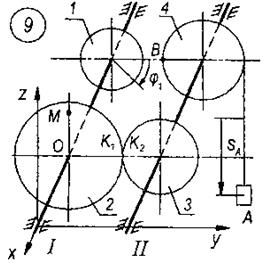
Задание К-2
«Вращательное и поступательное движение твердого тела»
По заданному уравнению вращательного движения вала I ᵠ1(t) или уравнению поступательного движения тела A SA(t) и заданным радиусам колес Rl, R2,R3,R4 следует: 1) определить уравнения вращения вала ᵠ11(t), уравнение движения тела A SA(t) (если они не заданы) 2) выразить кинематические характеристики вращения валов и движения тела А: ω1, ω11,ε1, ε11, VA, а t A ;3) записать формулы для скоростей и составляющих ускорений точек K1, K2, B: VK1,VK2,VB,ak1t ,ak2t ,aBt,ak1n,ak2n,aBn 4) вычислить все указанные величины для момента времени t{ и изобразить соответствующие векторы.
Схемы механизмов помещены на рисунке Б. 1 приложения Б, расчетные данные приведены в таблице Б.1.
|
Вариант |
R1, м |
R2, м |
R3, м |
R4, М |
ᵠ,(t),рад |
SA(t), м |
t1,c |
|
4 |
0,35 |
0,45 |
0,65 |
0,45 |
— |
1,35t — 0,9t2 |
1/2 |
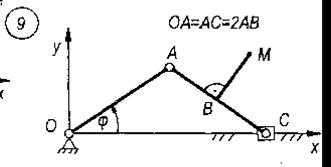
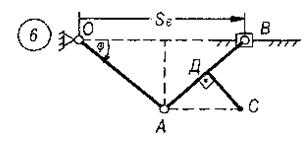
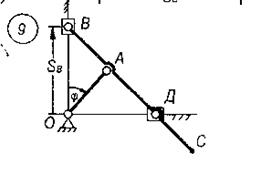
Задание К-3 «Кинематика плоских механизмов»
Для механизма, схема которого изображена на рисунке (см. приложение), определить вид движения каждого звена механизма и уравнения их движения. Найти в момент времени t1: 1) угловые скорости звеньев механизма; 2) скорости точек А, В и С механизма и мгновенные центры скоростей тел, совершающих плоскопараллельное движение; 3) угловые ускорения звеньев механизма; 4) ускорения точек А, В и С механизма; 5) мгновенные центры ускорений тел, совершающих плоскопараллельное движение.
Схемы механизмов помещены на рисунках В.1 приложения В, расчетные данные — в таблице В.1.
Примечание — на рисунках В.1 приложения В приведены схемы механизмов, для которых движение происходит на некотором ограниченном интервале времени. Стрелками указаны положительные направления отчета координат ᵠ, SA ,SB Качение колес происходит без скольжения.
|
Для схем 1-9 |
||||
|
№ варианта |
ᵠ(t),Рад |
SB (t), см |
OA, см |
t1,см |
|
4 |
|
— |
50 |
1 |
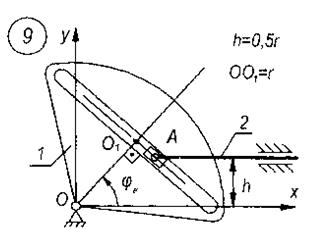
Задание К-4 «Сложное движение точки»
По заданному уравнению движения тела 1 ᵠe = α coskt + βsinkt определить абсолютную, относительную, переносную скорости и абсолютное, относительное, переносное ускорения точки А, принадлежащей телу 2, в момент времени t1.
Схемы механизмов показаны на рисунке Г.1 приложения Г, а необходимые для расчета данные — в таблице Г. 1.
На всех схемах направление вращения звена 1 соответствует положительному значению ᵠ, хоу — неподвижная система координат.
|
Номер варианта |
α, рад |
β рад |
k рад/с |
r, м |
|
4 |
— |
π/4 |
|
0,08 |
 π /6
π /6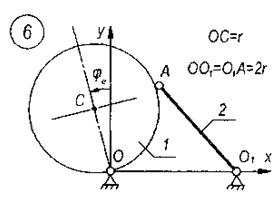 |


