Лекции по динамике
Лекция 1
Введение. Динамические нагрузки, возникающие в процессе работы транспортной техники
Транспортная техника должна соответствовать выполняемым ею технологическим процессам, высоким технико-экономическим показателям. Однако повышение этих показателей, в свою очередь, вызывает увеличение скоростей движения рабочих органов, сокращение периодов их разгона и торможения. Данные факторы способствуют увеличению динамических нагрузок в элементах конструкции машин и могут препятствовать снижению веса и улучшению других показателей.
По режиму работы транспортная техника подразделяется на подъемно-транспортные, землеройно-транспортные, строительно-дорожные машины, тракторы и автомобили.
Подъемно-транспортные машины подразделяются на два основных класса: грузоподъемные, работающие в периодическом режиме и предназначенные для перемещения грузов по вертикали и передачи их из одной точки площади, обслуживаемой машиной, в другую; машины непрерывного транспорта, работающие в непрерывном режиме и предназначенные для перемещения грузов по заданной трассе и других работ.
Землеройно-транспортные машины применяются как простые, но высокоэффективные средства механизации на земляных работах в строительной, горнорудной и других отраслях промышленности. К ним относятся бульдозеры, скреперы, автогрейдеры.
Строительно-дорожные машины применяют для механизации и автоматизации погрузочно-разгрузочных, транспортных работ, дорожного строительства. Они подразделяются на погрузочно-разгрузочные, землеройные, дорожные машины. К землеройным машинам относятся одноковшовые и многоковшовые экскаваторы, шагающие драглайны.
Тракторы и автомобили предназначены, в основном, для механизации транспортных операций в строительстве и различных отраслях промышленности. Данные машины подразделяются на следующие классы: грузовые автомобили, тракторы гусеничные и колесные, пневмоколесные тягачи, специализированные транспортные средства.
Установлено, что 60% отказов современной транспортной техники, в основном, связано с динамическими нагрузками, которые приводят к повышенному изнашиванию трущихся элементов, усталостному разрушению несущих металлоконструкций и деталей механизмов, появлению недопустимых остаточных деформаций и т. п.
Для исследования динамики реальную машину заменяют физической моделью, представляющей собой несколько сосредоточенных масс (ротор двигателя, тормозной шкив, рабочие звенья), соединенных упругими безмассовыми связями (канаты, валы, ленты и др.). Под действием внешних нагрузок (моментов электродвигателей и тормозов, сопротивлений рабочей машины) упругие элементы деформируются, а сосредоточенные массы машин, кроме основного движения, совершают малые колебания.
Во многих механизмах транспортной техники динамические нагрузки имеют решающее значение. Знание действительных нагрузок позволяет создавать надежные конструкции машин с улучшенными параметрами, а при эксплуатации – достигать наибольшей производительности обоснованным использованием резервов прочности и мощности.
Основная литература [3, c.317…319]
Дополнительная литература [10, c.31…34]
Контрольные вопросы:
1. Приведите классификацию транспортной техники по режиму работы.
2. Что представляет собой физическая модель, которой заменяют реальную машину для исследований динамики?
3. Какова главная цель динамических расчетов транспортной техники?
Лекция 2
Составление расчетных динамических схем машин и механизмов. Приведение сил, масс, моментов инерции, жесткостей
Динамический расчет начинают с составления расчетной динамической схемы машины и уравнений движения масс, входящих в эту схему. От реальной машины к расчетной динамической схеме переходят, пренебрегая теми физическими факторами, которые для конкретного расчетного режима имеют несущественное значение.
Выбор той или иной расчетной схемы определяется задачей расчета. В расчетных динамических схемах реальные параметры машин (масса, коэффициенты жесткости, податливости и т. п.), а также внешние нагрузки заменяют приведенными величинами для упрощения расчетных уравнений и соот ношений. Приведение параметров и нагрузок производят на основании равенства общей энергии приведенной системы. Приведение производится либо к поступательному движению, либо к вращательному движению одной из масс механизма.
Критерием достоверности принятой расчетной схемы является опыт, сравнение теоретического расчета с результатами эксперимента.
Приведенные силы определяют из условия равенства их работы сумме работ тех сил, которые они заменяют, т. е.
где ![]() приведенная сила;
приведенная сила; ![]() проекция действующей на i—e звено силы на направление движения центра масс этого звена;
проекция действующей на i—e звено силы на направление движения центра масс этого звена; ![]() момент, действующий на i—e звено.
момент, действующий на i—e звено.
Из этого уравнения находим:
 (2.1)
(2.1)
Приведенная масса и приведенный момент инерции определяются из условия равенства кинетической энергии приведенной массы сумме кинетических энергий масс, которые она заменяет. Аналитически это правило выражается уравнениями:
где mпр и ![]() Jпр — приведенная масса и приведенный момент инерции;
Jпр — приведенная масса и приведенный момент инерции; ![]() и
и ![]() -линейная и угловая скорости звена приведения; mi u Ji — масса и момент инерции i — го звена механизма;
-линейная и угловая скорости звена приведения; mi u Ji — масса и момент инерции i — го звена механизма; ![]() и
и ![]() — линейная и угловая скорости i — го звена механизма.
— линейная и угловая скорости i — го звена механизма.
Из этих уравнений находим
 (2.2)
(2.2)
 (2.3)
(2.3)
Приведение жесткостей выполняется так, чтобы потенциальная энергия приведенной системы равнялась потенциальной энергии реальной упругой системы.
Пусть имеется система из двух валов с жесткостью C1 и С2, соединенных между собой зубчатой передачей (рис. 2.1, a), которую требуется заменить системой с одним упругим элементом, имеющим приведенную жесткость Спр (рис.2.1, b), причем, жесткости следует привести к валу 1.
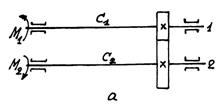
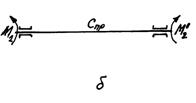
Рисунок 2.1 — Схема к приведению жесткостей двух валов с зубчатой передачей к жесткости одного вала
Если к валу 1 приложен момент M1, то момент, приложенный к валу 2, M2 = M1.U; в приведенной системе 
В нашем примере: потенциальная энергия реальной системы
П = М1.φ1 /2 + М2. φ 2 /2 = М1(φ 1 + φ 2.U) /2,
где φ1 , φ2.- углы закручивания валов под действием приложенных к ним моментов, причем φ1 = M1/C1; φ2 = M2/C2; U — передаточное число зубчатой передачи.
Потенциальная энергия приведенной системы
П = М1. φ пр /2,
где φ пр — угол закручивания приведенной системы.
Приравнивая два выражения потенциальной энергии, получаем
φ пр = φ 1 + φ 2.U. (2.4)
Согласно определению, приведенная жесткость
Cпр= М1/ φ пр = М1/( φ 1 + φ 2.U) .
Подставляя в это уравнение значения М1 = φ1.С1 и φ 2 = φ 1C1U/C2,
получаем 1/Cпр = 1/C1 + U2/C2 или Cпр = C1 . C2 / (С1U2 + C2). (2.5)
Основная литература [3, c. 319…325]
Дополнительная литература [10, c. 34…36]
Контрольные вопросы:
1. Сколько масс и какой способ соединения между ними должна содержать расчетная динамическая схема?
2. К какому виду движения одной из масс механизма производится приведение параметров машин и внешних нагрузок?
3. Приведите зависимости для определения приведенных сил, масс, моментов инерции и жесткостей.
Лекция 3
Общие уравнения динамики машин и механизмов
Динамические нагрузки в упругих элементах механизмов и машин определяют из дифференциальных уравнений движения масс, причем число уравнений, подлежащих совместному решению, равно числу степеней свободы системы. Дифференциальные уравнения движения системы можно составить различными методами: Даламбера, Лагранжа, Эйлера-Ньютона и другими.