Способы нахождения мгновенного центра ускорений
Рис. 31
Мгновенный центр ускорений лежит на прямой, проведенной под углом α ( tgα=ε/ω2) к ускорению точки О.
При этом α надо отложить от ускорения aO в направлении дуговой стрелки углового ускорения ε.
 Только в точках этой прямой ускорение aO и ускорение от вращения aQO могут иметь противоположные направления и одинаковые по модулю значения:
Только в точках этой прямой ускорение aO и ускорение от вращения aQO могут иметь противоположные направления и одинаковые по модулю значения:
Но  следовательно
следовательно 
Мгновенный центр ускорений является единственной точкой фигуры, ускорение которой в рассматриваемый момент времени равно нулю. В другой момент времени мгновенный центр ускорений находится в общем случае в другой точке плоской фигуры.
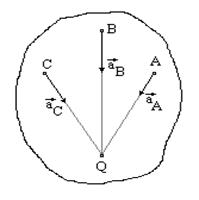
Если положение мгновенного центра ускорений известно, то выбрав его за полюс, для ускорения произвольной точки А, имеем:
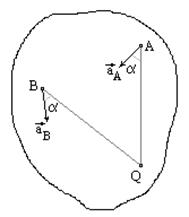 и ускорение aA направлено под углом α к отрезку AQ, соединяющего точки A и Q в сторону дуговой стрелки ε (рис. 32).
и ускорение aA направлено под углом α к отрезку AQ, соединяющего точки A и Q в сторону дуговой стрелки ε (рис. 32).
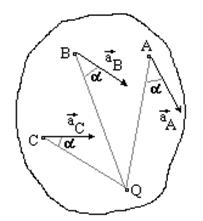
 Ускорения двух точек A и B показаны на рисунке, их величины равны
Ускорения двух точек A и B показаны на рисунке, их величины равны
Рис. 32
Следовательно, ускорения точек плоской фигуры при плоском движении можно определить так же, как и при вращательном движении плоской фигуры вокруг мгновенного центра ускорений с угловой скоростью ω и угловым ускорением ε.
Для вычисления скоростей принимают, что фигура вращается вокруг мгновенного центра скоростей, для вычисления ускорений принимают, что фигура вращается вокруг мгновенного центра ускорений. В общем случае эти центры являются разными точками плоской фигуры.
Ускорения точек плоской фигуры при плоском движении подобно скоростям точек можно вычислить двумя способами: по формуле  , выражающей зависимость ускорений двух точек плоской фигуры (способ 1) и по формуле
, выражающей зависимость ускорений двух точек плоской фигуры (способ 1) и по формуле  , используя мгновенный центр ускорений (способ 2). Часто мгновенный центр ускорений (кроме случаев, когда ω или ε равных нулю) располагается так, что трудно определить расстояние от него до рассматриваемых точек фигуры, поэтому рекомендуется использовать способ 1 через формулу, связывающую ускорения точек фигуры.
, используя мгновенный центр ускорений (способ 2). Часто мгновенный центр ускорений (кроме случаев, когда ω или ε равных нулю) располагается так, что трудно определить расстояние от него до рассматриваемых точек фигуры, поэтому рекомендуется использовать способ 1 через формулу, связывающую ускорения точек фигуры.
Способы нахождения мгновенного центра ускорений.

1.
Ускорения всех точек направлены к мгновенному центру ускорений (Рис. 33), так как они состоят только из одной нормальной составляющей от вращения вокруг мгновенного центра ус
Рис. 33 корений.
 Если известно aA, то AQ = aA/ω2.
Если известно aA, то AQ = aA/ω2.

2.
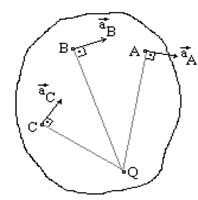
мгновенное поступательное движение (Рис. 34). Мгновенный центр ускорений лежит на пересечении перпендикуляров к ускорениям точек.
Рис. 34
 Если известно aA, то AQ = aA/ε.
Если известно aA, то AQ = aA/ε.

3.
 Имеем общий случай, ранее уже обсуждавшийся. Угол α откладываем по дуговой стрелке ε от вектора ускорения (Рис. 35).
Имеем общий случай, ранее уже обсуждавшийся. Угол α откладываем по дуговой стрелке ε от вектора ускорения (Рис. 35).
Если известно aA, то ![]()
Рис. 35
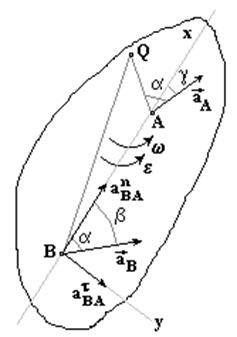 4. Пусть в данный момент времени известны ускорения двух точек плоской фигуры A и B (Рис. 36). Приняв за полюс точку A, имеем:
4. Пусть в данный момент времени известны ускорения двух точек плоской фигуры A и B (Рис. 36). Приняв за полюс точку A, имеем:
 (*),
(*),
 где
где
Проецируя левую и правую части векторной формулы (*) на оси Bx и By получаем:
 ,
,

Рис. 36
где β и γ в принципе известные углы.
Проекцию anBA на ось Вх берем со знаком (+), так как она всегда направлена к оси вращения (к полюсу). Проекцию aτBA, берем со знаком (+) предполагая, что стрелка ε направлена против часовой стрелки.
Из уравнений проекций находим

знак ε определяется после подстановки данных в формулу.
После того, как найдены ε и ω, задача нахождения мгновенного центра ускорений сводится к случаю 3.
Вопросы для самопроверки:
1. Как задается скорость и ускорение в декартовой системе координат?
2. Какие системы координат Вы знаете?
3. Какое движение называется абсолютным, относительным, переносным?
4. Какое движение называется поступательным?
5. Какое движение называется вращательным?
6. Как определить мгновенный центр скоростей?
7. Как определить мгновенный центр ускорений?
3. ДИНАМИКА
3.1. Основные понятия
Динамикой называется раздел механики, в котором изучается движение материальных тел под действием сил.
В динамике, в отличие от кинетики, при изучении движения тел принимают во внимание как действующие на них силы, так и инертность самих материальных тел.
Инертность тела проявляется в том, что оно сохраняет свое движение при отсутствии действующих сил, а когда на него начинает действовать сила, то скорость точек тела изменяются не мгновенно, а постепенно и тем медленнее, чем больше инертность этого тела. Количественной мерой инертности материального тела является физическая величина, называемая массой тела. В классической механике масса m рассматривается как величина скалярная, положительная и постоянная для каждого данного тела.
Кроме суммарной массы движение тела зависит еще в общем случае от формы тела, точнее от взаимного расположения образующих его частиц, т. е. от распределения масс в теле.
Чтобы при первоначальном изучении динамики отвлечься от учета тела (распределения масс), вводят абстрактное понятие о материальной точке, как о точке, обладающей массой, и начинают изучение динамики с динамики материальной точки.
3.2. Классификация сил. Динамика материальной точки
Сила тяжести – постоянная сила, действующая на тело, находящееся вблизи земной поверхности. P= mg,
где m – масса тела, g – ускорение свободного падения.
Сила упругости – P = cλ,
где c – коэффициент жесткости, λ – перемещение тела.
Сила трения – P = fN,
где f – коэффициент трения, N – нормальная реакция.
Сила тяготения – сила с которой притягиваются к друг к другу два материальных тела P = fm1m2/r2,
где f – гравитационная постоянная, m1 и m2 – массы двух тел, r – расстояние между центрами этих тел.
Сила вязкого сопротивления – P = μv ,
где μ – коэффициент сопротивления среды, v – скорость тела.
Движение материальных точек и тел следует рассматривать относительно определённой системы отсчёта. В классической механике в основу, которой положены законы И. Ньютона, такая система называется инерционной системой отсчёта. Пространство считается трёхмерным эвклидовым пространством, свойства которого не зависят от движущихся в нём материальных объектов.


