Виды связей — статика
3. Связь – тело, ограничивающее свободу движения твёрдого тела.
4. Если приложенные силы стремятся сдвинуть тело (например, вниз), а связь препятствует перемещению, то тело действует на связь с силой давления на связь (рис).
5. По 4 аксиоме – связь действует на тело с такой же силой, но противоположно направленной.
Сила реакции связи – сила, с которой связь действует на тело, препятствуя его перемещению.
6. Направление реакции связи – противоположное тому, куда связь не даёт перемещаться телу. (связь не даёт перемещаться вниз, значит — реакция связи направлена вверх)
6. Аксиома связи (принцип освобождаемости твёрдого тела от связи) – всякое несвободное тело можно рассматривать как свободное, если мысленно отбросить наложенные на тело связи и приложить вместо них силы реакции этих связей.
7. Силы, действующие на тело, разделяют на:
А) активные — заданные (приложенные к телу).
Б) пассивные (реакции связей) – возникают, когда тело оказывает давление на связь.
Виды связей
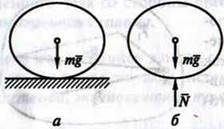
Гладкая поверхность или плоскость
— гладкая поверхность – на которой можно пренебречь трением;
— тело не может перемещаться только вниз (не даёт связь);
—одна реакция связи N (вектор) направлена по нормали вверх или по перпендикуляру к поверхности;
— реакция приложена в точке касания.
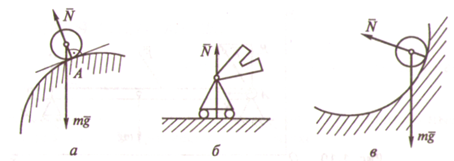
Гладкая опора
— связь не даёт перемещаться телу по перпендикуляру поверхности тела в точке опоры;
-одна реакция связи направлена по нормали к опоре и приложена в точках А и В
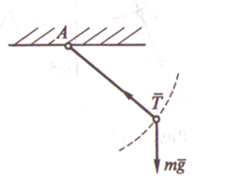
Гибкая нить
— тело не может удалиться от точки привеса А;
— одна реакция связи Т (вектор) направлена вдоль нити к точке закрепления.
Цилиндрический шарнир
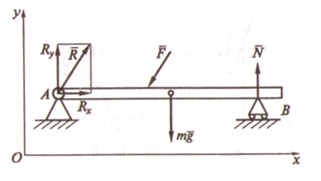
— шарнирно неподвижная опора вала: шарнир – означает допуск вращения вала, неподвижная – не допуск перемещения в плоскости хОу;
– ось проходит через шарнир А перпендикулярно плоскости чертежа;
— две реакции связи (шарнира) в плоскости, перпендикулярной оси вращения вала Ry и Rх, направление – проекции на оси Ох и Оу.
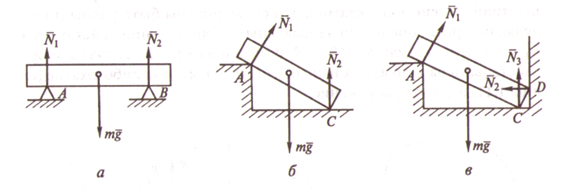
Невесомый стержень
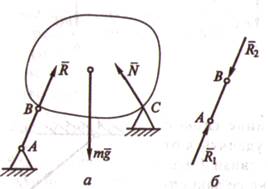
— невесомый стержень (пренебрегают массой) – испытывает действие двух сил в шарнирах А и В;
— стержень шарнирно прикреплён к телу;
– оси проходят через шарниры А и В перпендикулярно плоскости чертежа;
— две реакции связи (в плоскости, перпендикулярной оси вращения в шарнирах А и В) – R1 и R2;
— стержень не может перемещаться ни вверх, ни вниз = реакции связи направлены к стержню
( сжатие) или от стержня (растяжение)
— стержень находится в равновесии – значит, по аксиоме 1 силы должны быть равны по модулю, но противоположно направлены по линии действия;
Жёсткая заделка
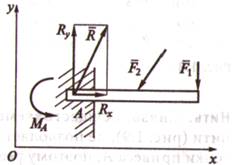
— жёсткая означает: невозможность перемещений вдоль осей Ох и Оу и поворота в плоскости хОу;
— три реакции связи: Rx, Ry и МА (момент в заделке, «момент» означает изгиб
Самостоятельная работа обучающихся – (2 часа – эзс, арх, авто – нет)
1. Составить глоссарий основных понятий статики
2. Изучить дополнительную информацию и составить обзорный конспект по теме «Развитие технической механики
ТЕМА 1.2. ПЛОСКАЯ СИСТЕМА СХОДЯЩИХСЯ СИЛ
(2часа — авто и эзс, 4 часа – арх)
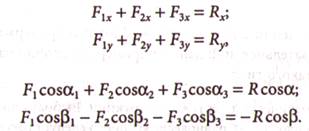
Определение равнодействующей сходящихся сил графическим способом (рис. а, б)
1. Сходящиеся силы – силы, линии действия которых пересекаются в одной точке (построение силового многоугольника) – рис а, б
Определение равнодействующей сходящихся сил аналитическим способом
– по рис в.
1. Проектируем векторное равенство ![]() +
+ ![]() +
+ ![]() =
= ![]() на оси координат
на оси координат
2. Получаем алгебраические равенства:
3. Отсюда определим значение равнодействующей всех сходящихся сил:
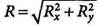
4. И направление вектора ![]()
Cosα = RxR
Cosβ = RyR
Условия равновесия системы сходящихся сил
1. При геометрическом способе сложения — равенство нулю равнодействующей ![]() – т. е. силовой многоугольник должен быть замкнут
– т. е. силовой многоугольник должен быть замкнут
2. При аналитическом способе сложения – проекции равнодействующей силы на оси координат должны быть равны нулю (Rx = Ry = 0)
Отсюда для плоской системы сходящихся сил два уравнения равновесия этих сил:
∑Fix =0 ∑Fiу =0
Вывод: для равновесия системы сходящихся сил необходимо и достаточно, чтобы сумма проекций всех сил на каждую из осей координат была равна нулю.
Теорема о равновесии трех непараллельных сил
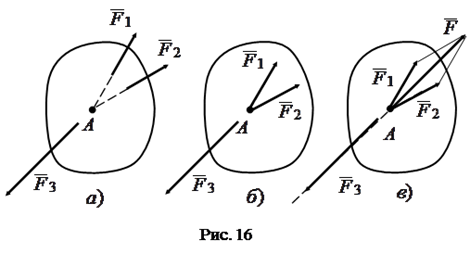
— Тело находится в равновесии под действием двух сил ![]() и
и ![]() ( рис. 16в),
( рис. 16в),
— Следовательно, по аксиоме 1 они должны иметь общую линию действия,
— тогда ![]() ,
, ![]() и
и ![]() лежат в одной плоскости, их линии действия пересекаются в точке
лежат в одной плоскости, их линии действия пересекаются в точке ![]()
Методика решения задач
1. При равновесии плоской системы сходящихся сил, приложенных к одному телу, число неизвестных величин не должно превышать двух (условие статической определимости):
А) неизвестна одна сила (модуль и направление)
Б) неизвестны направления двух сил системы
В) неизвестны: модуль одной силы и направление другой;
Г) неизвестны модули двух сил.
2. Методы решения задач на равновесие системы сходящихся сил:
А) графический — во всех четырех случаях можно построить замкнутый силовой многоугольник и найти в нем неизвестные величины.
Б) графо-аналитический – для равновесия трех сил: произвольном масштабе строится замкнутый треугольник, решается на основе геометрических либо тригонометрических соотношений.
В) аналитический (метод проекций) — для решения задач с числом сил больше трех.
Самостоятельная работа обучающихся по теме 1.2. – (эзс, арх — 3 часа)
1. Решить задачи на определение усилий в стержнях ферм по вариантам
2. Составить краткий алгоритм решения задач на равновесие плоской системы сходящихся сил
Авто – 2 часа
1. Выполнение расчётно-графической работы по определению реакций связей плоской системы сходящихся сил аналитически и графически
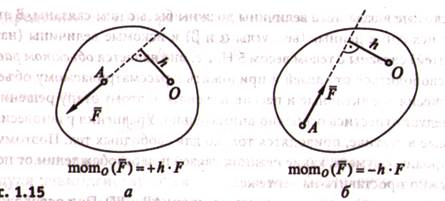
Тема 1.3. МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИ. ПАРА СИЛ
(1 час – все)
Момент силы относительно точки
1. Сила действует на тело и может:
А) смещать его;
Б) поворачивать вокруг точки