Лекция по статике
ВВЕДЕНИЕ (1 час авто)
Механика – древняя наука
Развивалась вместе с эволюцией человечества – отвечая на многочисленные запросы практики
В древности не было деления науки по отраслям знаний =
Механика – являлась составной частью науки о природе и обществе
После Аристотеля (384 – 322 гг. до н. э.) – выделение частных наук из общего естествознания.
Пример: в древнем Египте при строительстве пирамид пользовались рычагами, наклонными плоскостями, блоками.
Эмпирические знания человечества помогли установить законы механики.
Основоположник механики – Архимед (ок.287-212 гг. до н. э.) – он дал точное решение задач о равновесии сил, приложенных к рычагу, об определении центра тяжести тел.
Эпоха Возрождения (14-16 вв.) – большой вклад в развитие механики внёс художник, учёный и инженер Леонардо да Винчи (1452-1519): изучил трение скольжения, движение падающего тела, ввёл понятие момент силы.
Польский каноник и астроном Николай Коперник (1473 – 1543) – переворот в естествознании: на смену геоцентрической системе Птолемея пришла гелиоцентрическая система мира.
На основании его учения немецкий математик и астроном Иоганн Кеплер (1571 – 1630) – сформулировал три закона движения планет
Основоположники основ динамики – итальянец Галилео Галилей (1564-1642) и англичанин Иисак Ньютон (1643 – 1727) – открыл закон всемирного тяготения
18 в. – разработаны общие принципы классической механики, исследования по механике твёрдого тела, гидродинамике и небесной динамике.
Россия, 1725 г. – по инициативе Петра I образована Российская Академия наук
Ломоносов (1711 – 1765), Леонард Эйлер (1707 – 1783) — математик, астроном и физик, швейцарец (1707 – 1783) – большое влияние на развитие механики: исследования по механике твёрдого и упругого тела: заложил фундамент наукам:
— сопротивление материалов;
— теория упругости
18-19вв. – Иоганн и Даниил Бернулли, Жан Даламбер, Жозеф Лагранж
Вариньон, Пуансо – развитие статики наряду с развитием динамики
Отечественные учёные для дальнейшего развития механики: Остроградский, Чебышев, Ковалевская, Ляпунов, Мещерский. Циолковский, Крылов. Жуковский и т. д.
Сегодня – бурно развивается наука о прочности и деформируемости элементов сооружений и деталей машин – сопротивление материалов
Задачи теоретической механики
1. Главная цель «Технической механики» (Т. М) — подготовка к изучению «Строительных конструкций (СК)»
2. И в механике, и в конструкциях – выполнение расчётов, обеспечивающих надёжность работы конструкций под нагрузкой
3. Существенные отличия в методах расчёта:
А) в Т. М. расчёты более упрощенные, «грубые», а конструкции более простые;
Б) в С. К. учитываются реальные свойства материалов конструкций;
В) в С. К. учитываются конструктивные требования.
РАЗДЕЛ 1. СТАТИКА
ТЕМА 1.1. ОСНОВНЫЕ ПОНЯТИЯ И АКСИОМЫ СТАТИКИ
(3 часа – эзс, 4 часа – арх, 2часа – авто)
Основные понятия статики
1. Техническая механика – наука, в которой изучается механическое движение тел и устанавливаются общие законы этого движения.
2. Составные части теоретической механики: статика + кинематика + динамика
3. Статика – раздел теоретической механики, в котором изучаются законы приведения и условия равновесия сил, действующих на материальные точки.
4. Абсолютно твёрдое тело – расстояние между любыми двумя точками которого остаётся неизменным (тела под нагрузкой деформируются, но незначительно).
5. Сила – векторная величина, представляющая собой меру механического воздействия одних тел на другие.
6. Сила как вектор – имеет модуль F, точку приложения А, и направление (линию действия силы).
Fх = F cosα
Fу = F cosβ
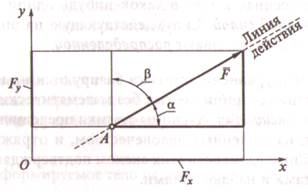
Модуль вектора F, т. е. значение силы, определяют по теореме Пифагора
F = √ Fх2 + Fу2
7. Механическое воздействие – взаимодействие материальных тел, в результате которого с течением времени происходит:
— изменение взаимного положения тел в пространстве (механическое движение);
— изменение взаимного положения частиц тела (деформация).
8. Материальная точка – абсолютно твёрдое тело, размерами которого можно пренебречь, мысленно сосредоточив массу этого тела в точке.
9. Система сил – совокупность нескольких сил, действующих на данное тело.
10. Эквивалентные системы сил – две системы, действуя на одно и то же твёрдое тело, производят одинаковое механическое воздействие.
11. Внешние силы – силы, действующие на частицы тела со стороны других материальных тел.
12. Внутренние силы — силы, действующие на частицы тела со стороны других частиц этого же тела.
13. Уравновешенная система сил (система, эквивалентная нулю) – если под действием данной системы сил свободное тело может находиться в покое.
14. Равнодействующая системы сил – если система сил эквивалентна одной силе;
15. Сосредоточенная сила – приложенная к телу в одной точке.
16. Распределённая сила – действует на определённую часть поверхности тела.
Аксиомы статики
1. Все теоремы и уравнения статики базируются на аксиомах – результат знаний и опыта и отражают объективные процессы (самолёт или снаряд).
2. Свободное тело – тело, которое может совершать любые перемещения в пространстве.
Аксиома 1. Две силы (![]() и
и ![]() ), действующие на свободное абсолютно твёрдое тело, находятся в равновесии тогда и только тогда, когда они равны по модулю и направлены вдоль одной прямой в противоположные стороны.
), действующие на свободное абсолютно твёрдое тело, находятся в равновесии тогда и только тогда, когда они равны по модулю и направлены вдоль одной прямой в противоположные стороны.
Аксиома 2. Действие данной системы сил на абсолютно твёрдое тело не изменится, если к ней прибавить или от неё отнять уравновешенную систему сил.

Следствие из аксиом 1 и 2. Точку приложения силы, действующей на абсолютно твёрдое тело, можно переносить вдоль её линии действия в любую другую точку тела.
— в точке А к твёрдому телу приложена сила ![]()
— в точке В приложим две силы ![]() , и ,
, и , ![]() – равные по модулю силе
– равные по модулю силе ![]() и направлены по её линии действия в противоположные стороны;
и направлены по её линии действия в противоположные стороны;
— по аксиоме 2 отбросим уравновешенную систему сил ![]() и
и ![]()
— в результате на тело действует сила ![]() , равная силе
, равная силе ![]() , но приложенная в точке В.
, но приложенная в точке В.
Аксиома 3. Две силы, приложенные к телу в одной точке, имеют равнодействующую, являющуюся диагональю параллелограмма, построенного на этих силах как на сторонах.
Вектор R представляет собой геометрическую сумму векторов F1 и F2
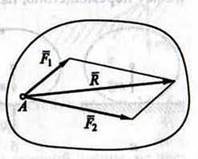

Из аксиомы 3 следует, что равнодействующая двух сил, приложенных в одной точке, равна их геометрической сумме и приложена в той же точке.
Аксиома 4. Два материальных тела действуют друг на друга с силами, равными по величине и противоположно направленными.
Такая система сил не является уравновешенной, так как силы приложены к разным телам.
Аксиома 5. Если деформируемое тело находится в равновесии под действием данной системы сил, то равновесие не нарушится, если тела станут абсолютно твёрдыми (аксиома затвердевания).
Связи и реакции связей
1. Свободное тело – тело, которое может совершать любые перемещения в пространстве.
2. Несвободное тело – тело, на перемещение которого наложены ограничения. (В зданиях и сооружениях несвободные тела – перекрытия, стены и др.)