Определение ведущего момента при неустановившейся нагрузке машинно-тракторного агрегата
3. Напишите выражение для тягового баланса машины.
Лекция 14
Определение ведущего момента при неустановившейся нагрузке машинно-тракторного агрегата
В реальных условиях эксплуатации тракторных агрегатов создать установившуюся нагрузку невозможно. При переключении передач вследствие неуравновешенности двигателя и колёс, неровности микрорельефа дорог и др. факторов на трактор действует неустановившаяся (изменяемая по времени) нагрузка.
Вращающиеся массы машин колеблются относительно осей вращения, а поступательно движущиеся массы – вдоль линии направления движения. Такие колебания происходят потому, что трактор представляет собой систему сосредоточенных масс (маховик, шестерни, колёса, остов), соединённых между собой упругими звеньями (валы трансмиссии, пневмошины, рессоры). При этом в упругих звеньях дополнительно возникают инерционные, динамические моменты и силы.
Для определения ведущего момента при неустановившейся нагрузке тракторный агрегат заменяют эквивалентной в энергетическом отношении динамической моделью: приводят массы и жёсткости машины к какому-либо элементу по определённым правилам механики.
Если применить эти правила к трактору (автомобилю), динамическая схема вращающихся частей которого рассмотрена в лекции 13, и привести все массы, податливости и моменты к оси ведущих колёс, то получим динамическую модель машины, схематически показанную на рис.14.1,а.
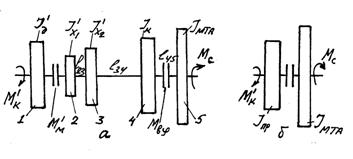

Рисунок 14.1. Схемы динамических моделей движущегося трактора или автомобиля: а – пятимассовая; б – двухмассовая; в – одномассовая
На рис.14.1 указаны следущие приведенные величины: M’k= Mk · iтр · ηтр — крутящий момент двигателя; J,д=Jд · iтр2 · ηтр – момент инерции маховика и других вращающихся частей двиателя; Jx1 и Jx2 – моменты инерции шестерён коробки передач и главной передачи трактора; JМТА= mМТА · rk2+ Jk2 · (rk/ rk2)2 – суммарный момент инерции поступательно движущихся масс трактора, рабочего оборудования и ведомых колёс; M’, m и M’вед.φ — соответственно момент трения главной муфты сцепления и ведущий момент по сцеплению; Мсопр= ΣPсопр · rk – момент сил сопротивления движению машины; Ɩ23, Ɩ34 и Ɩ45 – податливости валов коробки передач, главной передачи с полуосями и пневмошины.
Моменты инерции вращающихся масс податливости валов определяют экспериментально методом качаний масс и теоретически (расчётом).
Составляем уравнения движения в форме Лагранжа с целью получения дифференциальных уравнений колебаний (движения) массы 1 (рис.14.2,а) имеет вид
 (14.1)
(14.1)
где К – кинетическая энергия вращающейся массы 1, К = J,д · ωk2/2; q – обобщённая координата, определяющая положение массы 1 в любой момент времени, q = ψ (ψ – угол поворота массы 1).
Так как ψ = ωk, то
 ;
;  ; Qоб = Мк — Мм.
; Qоб = Мк — Мм.
Подставив полученные выражения и значения J,д ; M’k ; M’м в уравнение Лагранжа, после преобразований получим дифференциальное уравнение колебаний массы 1:
Jд · iтр ·dωk/dt= Мк — Мм (14.2)
Так как ωk · iтр= ωд , т. е. угловой скорости вращения коленчатого вала двигателя, то
Jдd ωд /dt = Мк — Мм
Аналогично получают уравнения колебаний масс 2, 3, 4, и 5. Система этих уравнений следущая:
Jдd ωд/dt = Мк — Мм
Jx1·dωx1/dt = Мм — (ψ2 — ψ3)/Ɩ23; (14.3)
Jx2·dωx2/dt = (ψ2 — ψ3)/Ɩ23 — (ψ3 — ψ4)/Ɩ34;
Jk·dωk/dt = (ψ3 — ψ4)/Ɩ34 – Mвед.φ;
JMTA·dωk/dt = Mвед.φ — Mсопр;
Здесь ψ2, ψ3, ψ4 – углы закрутки валов масс 2, 3 и 4.
Решив эту систему уравнений, можно определить значение крутящего момента на любом валу трансмиссии, частоты колебаний масс и найти резонансные зоны.
Следовательно ведущий момент при неустановившейся нагрузке, подведённый к массе 4 ведущих колёс,
Mвед. н = (ψ3 — ψ4)/Ɩ34
Для упрощения задачи по определению Mвед. н допустим, что валы трансмиссии абсолютно жёсткие. Поэтому все вращающиеся массы можно привести к осям ведущих колёс с одинаковым знаком ускорения. Тогда вместо пятимассовой динамической модели машины получим двухмассовую модель (рис.14,б), для которой ведущий момент будет:
Mвед. н= Mвед.φ+ Mjk![]() Mвед.φ
Mвед.φ
где Mjk = j Jпр/rk – момент касательных сил инерции; j = dv/dt – ускорение.
Для дальнейшего упрощения задачи по определению Mвед. maxн допустим, что контакт колёс с дорогой представляет собой жёсткую связь, и динамическую модель машины можно представить в виде одномассовой модели (рис.14,в). Тогда при неустановившемся движении Mвед. н = Mсопр. Значение этого момента определим из уравнения движения одномассовой модели:
J, прdωк/dt = Мсопр – M’k (14.4)
где J, пр= mМТА · rk2 + Jпр – приведенный момент инерции всех вращающихся и поступательно движущихся масс машины.
Из уравнения (14.4) определим значение ведущего момента
Mведн= Mсопр= Mk · iтр · εтр+ ( mМТА · rk2+ Jпр)dωк/dt.
Так как mМТА · dv/dt = Pj, то
Mведн = Mвед.φ+ δвр · Pj· rk, (14.5)
где δвр = 1+ Jпр/( mМТА · rk2) – коэффициент учёта вращающихся масс машины.
Из уравнения (14.5) следует, что при неустановившейся нагрузке действует дополнительный крутящий момент Mjk= δвр·Pj·rk, что следует учитывать при прочностных расчётах элементов трансмиссии и движителей.
Основная литература [4, с. 5…129]
Дополнительная литература [13, с. 26…30]
Контрольные вопросы:
1. Назовите схемы динамических моделей движущегося трактора или автомобиля, которые получают путем приведения всех масс, податливостей и моментов к оси ведущих колёс.
2. Какие параметры учитываются при составлений дифференциальных уравнений колебаний пятимассовой динамической модели движущегося трактора или автомобиля?
3. Напишите выражение дополнительного крутящего момента, действующего на трактор (автомобиль) при неустановившейся нагрузке.
Лекция 15
Основные сведения о колебаниях трактора и автомобиля. Уравнения колебаний
Важным эксплуатационным качеством трактора и автомобиля является плавность хода. Недостаточная плавность хода проявляется в возникновении неприятных и вредных колебаний. Колебания вызываются возмущающими силами и зависят от системы подрессоривания, общей компоновки, конструктивных особенностей машины и др. факторов.
Подрессоренная часть автомобиля, как всякое свободное тело в пространстве, обладает шестью степенями свободы и может иметь следующие колебательные движения (рис. 15.1,а):
линейные:
вдоль оси z-z – подпрыгивание,
вдоль оси x-x – подергивание,
вдоль оси y-y – пошатывание;
угловые:
вдоль оси y-y – галопирование,
вдоль оси x-x – покачивание,
вдоль оси z-z – виляние (рыскание).
На рис 15.1,б подрессоренные элементы машины представлены массой m, сосредоточенной в их центре тяжести О. А неподрессоренные – двумя массами m1 и m2, из которых первая представляет собой массу передних колёс, а вторая – массу задних колёс.
Отношение подрессоренных масс к неподрессоренным называют коэффициентом μм подрессоренных масс:
μм = m/(m1+m2),
являющимся важной характеристикой колебательной системы. При снижении веса неподрессоренных масс уменьшается сила толчков, передаваемых подрессоренным массам, а при увеличении веса подрессоренных масс уменьшается их чувствительность к указанным толчкам. Для грузовых автомобилей μм = 4…5.
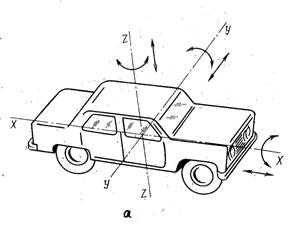
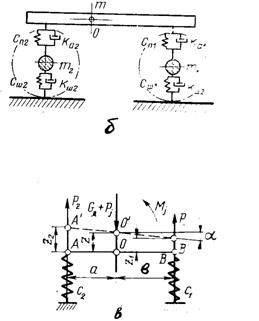
Рисунок 15.1 — Виды колебаний автомобиля (а), схема его колебательной системы (б), эквивалентная колебательная схема кузова (в).
Схема колебательной системы автомобиля, изображённая на рис.15.1,б, состоит из четырёх упругих элементов: передней и задней подвесок с приведенными коэффициентами жёсткости cп1 и cп2, передней и задней шин с коэффициентами жёсткости cш1 и cш2.
Общий коэффициент жёсткости, учитывающий совместные деформации подвески и шин, можно определить из условия, что под действием груза G их суммарный прогиб
f = fп + fш = G/cп + G/cш
где fп – прогиб подвески; fш – прогиб шин.
Отсюда находим общий коэффициент жёсткости
c = G/f = G/(G/cп + G/ cш) = cп cш/( cп + cш). (15.1)
Дифференциальное уравнение свободных вертикальных колебаний центра упругости подрессоренных масс автомобиля (при отсутствии сопротивлений в колебательной системе):
md2z/dt2 + (c1+c2)z = 0, (15.2)
где m – масса подрессоренной части автомобиля; d2z/dt2 – ускорение центра упругости; c1 + c2 – суммарный приведенный коэффициент жёсткости передней и задней подвесок; z – вертикальное перемещение.
Данное уравнение соблюдается при перемещении центра упругости по закону:
z = A·sin![]()


