Лекция по статике — пара сил
2. Пусть сила ![]() , приложенная в точке А, стремится повернуть тело вокруг точки О
, приложенная в точке А, стремится повернуть тело вокруг точки О
3. Вращательный момент этой силы будет зависеть от расстояния h — от точки О до линии действия силы (и не зависеть от точки приложения силы – так как силу можно переносить по линии её действия)
4. Момент силы относительно точки (центра О) называется величина = сила ×на кратчайшее расстояние: от точки О до линии действия силы с соответствующим знаком.
5. Правило знаков:
А) знак «+» — момент (изгиб) силы, которая стремится повернуть тело вокруг точки О против хода часовой стрелки.
Б) знак «-» — по ходу часовой стрелки.
В) если линия действия силы проходит через точку, то момент силы относительно этой точки = нулю.
6. Плечо относительно центра О – перпендикуляр из точки О на линию действия силы ![]()
Пара сил
1. Пара сил — система двух сил, приложенных к телу в двух разных точках:
— равных по модулю
— параллельных
— противоположно направленных
2. Плечо пары сил – кратчайшее расстояние между линиями действия сил пары.
Момент пары сил
Момент пары сил — произведение модуля любой силы на плечо пары (модуль силы х плечо)
Свойства пары сил
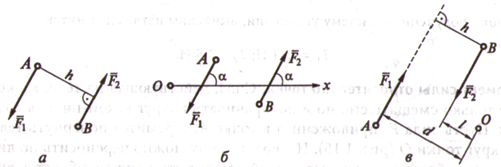
1. Сумма проекций на любую ось сил пары равна нулю
F2cosα – F1cosα = 0
2. Сумма моментов сил пары относительно любой точки плоскости равна моменту пары.
momo(![]() ) = — F1d = — Fd
) = — F1d = — Fd
momo(![]() ) = + F2l = +Fl
) = + F2l = +Fl
momo(![]() ) + momo(
) + momo(![]() ) = — Fd + Fl = — F(d-l) = — Fh
) = — Fd + Fl = — F(d-l) = — Fh
Следовательно, пару сил нельзя заменить равнодействующей.
Самостоятельная работа обучающегося по теме 1.3. (1 час – все)
1. Составить глоссарий основных понятий по теме «Пара сил» — арх, ‘эзс – 1 час
1. Решение задач на определение моментов сил относительно точки: авто – 1час
ТЕМА 1.4. ПЛОСКАЯ СИСТЕМА ПРОИЗВОЛЬНО РАСПОЛОЖЕННЫХ СИЛ
– (4 час арх, 2час авто, эзс)
Основные понятия
1. Плоская система сил – система сил, линии действия которых лежат в одной плоскости.
2. На плоскости могут быть приложены силы:
А) произвольно расположенные;
Б) пары сил;
В) силы, сходящиеся в одной точке.
3. Плоская система произвольно расположенных сил – все силы или линии их действия не пересекаются в одной точке.
Приведение плоской системы сил к заданному центру
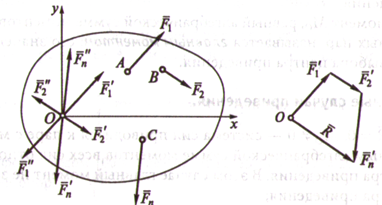
1. Пусть на твёрдое тело действует система сил 
2. Приложим в точке О по 2 уравновешенные силы:
А) одна равна и параллельна заданной: ![]()
Б) другая сила равна заданной, но противоположно направлена ![]()
3. В итоге на тело действует:
А) система сходящихся сил 
Б) система пар сил с моментами
![]()
![]()
4. Систему сходящихся сил заменяем равнодействующей
![]()
Или в соответствии с тем, что ![]() и т. д.
и т. д.
![]()
5. В соответствии со вторым свойством пары сил найдём алгебраическую сумму моментов всех пар
Мо = m1 + m2 + …+ mn
Лемма Пуансо
1. В результате произвольную плоскую систему сил можно заменить:
— одной силой, равной геометрической сумме всех сил, приложенных в произвольно выбранном центре и
— моментом, равным алгебраической сумме моментов присоединенных пар
2. Принятые определения:
А) точка о – центр приведения
Б) главный вектор – вектор R, равный геометрической сумме всех сил. Его значение не зависит от выбора центра приведения.
В) главный момент – момент МО, равный алгебраической сумме моментов присоединённых пар. Его значение зависит от выбора центра приведения (величина плеча будет меняться).
Частные случаи приведения
1. R0=0,M0≠0 – система эквивалентна паре сил с моментом, равным главному моменту системы, который в этом случае не зависит от выбора центра приведения;
2. R0≠0,M0=0 – система эквивалентна равнодействующей R. Главный вектор в данном случае – является равнодействующей.
3. R0≠0,M0≠0 – система эквивалентна равнодействующей R, приложенной в новом центре приведения, расположенном от прежнего на расстоянии d = МоR
4. R=0,M0=0 – плоская система сил находится в равновесии;
Теорема Вариньона (о моменте равнодействующей плоской системы сил)
Момент равнодействующей плоской системы сил относительно произвольного центра О равен алгебраической сумме моментов всех сил системы относительно этого центра.
Аналитические уравнения равновесия плоской системы сил
Условие равновесия выражается тремя уравнениями – основные уравнения равновесия:
![]()
2. Варианты записи уравнений равновесия – в зависимости от расположения сил
![]()
или

Класссификация нагрузок
Сосредоточенная Распределённая: по линии, по поверхности, по объёму Изгибающий момент
Балочные системы
1. Объект решения задач статики – балки (или балочные системы)
2. Балка – деталь в виде прямого бруса с опорами в двух (или более) точках.
Виды опор
1. Шарнирно-подвижная: вращение вокруг своей оси (шарнир) + поступательное перемещение (подвижная)
2. Шарнирно-неподвижная: вращение вокруг своей оси (шарнир)
3. Жёсткая заделка (защемление): препятствует любому перемещению.
Решение задач на определение опорных реакций
С помощью трёх уравнений равновесия определяют реакции опор (если число реакций связи не превышает трёх):
1. Показать нагрузки
2. Обозначают нагрузки
3. Освобождаются от опор и заменяют их действие на балку реакциями
4. Составляют уравнение равновесия
5. Решают уравнения равновесия и определяют из них опорные реакции
6. Проверка решения
Определение усилий в стержнях плоских ферм – вырезанием узлов
1. Аналитический способ
2. Графический способ – построением диаграммы Максвелла – Кремоны
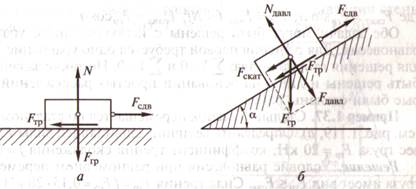
Элементы теории трения
ТЕМА 1.5. ЭЛЕМЕНТЫ ТЕОРИИ ТРЕНИЯ (авто — 1 час)
Самостоятельная работа обучающегося (авто – 1час)
1. Решение задач по индивидуальным заданиям
1. Понятие о трении
Сила трения возникает при соприкосновении тел и препятствует передвижению одного тела по поверхности другого.
2. Виды сил трения:
А) трение скольжения
Б) трение скольжения
3. Трение скольжения – сопротивление, возникающее при относительном перемещении одного тела по поверхности другого.